
The motors controller is designed to control up to four brushed DC motors. It uses 32-bit ARM-based microcontroller. The device is suitable to control the drives of mobile robots with two or four wheels. There are also implemented a lot of other features, so the device can be used for other purposes as well.
The project differs from other motors controllers mainly because it has ROS (Robot Operating System) support and it’s able to calculate and provide odometry data (relative position and orientation of mobile robot) based on encoders measurements. Additional software is provided like a C++ API and user application (GUI) to configure and diagnose the controller.
Device functionalities
- handles up to 4 brushed DC motors,
- handles up to 4 quadrature incremental encoders (inputs: A, B signals) with a logic level equal to 3,3 V or 5 V,
- the motors power supply should be in the range of 6-24 V DC,
- continuous current up to 8 A per motor,
- peak current up to 20 A per motor,
- communication by USB (HID),
- implemented two control modes:
- closed, speed loop with PID controller,
- open loop,
- separate tunings for every motor
- configurable watchdog to automatic motors shutdown in case of communication breaks
- many safety features: overvoltage protection, overcurrent protection, deadman’s switch
- two modes for different mobile platform types: two-wheeled (channels can be connected parallel) and four-wheeled
- odometry calculations what mean relative position and orientation based on incremental encoders measurements
- 4 digital outputs (DO) up to 1 A each, for example, to control the external brakes
- 4 digital inputs (DI) which can be configured as an emergency stop button, deadman’s switch, speed limiter, or as general purposes input
- low power consumption, especially in standby mode
- graphical user interface (GUI) to configure and diagnose device
- C++ API to handle, configure, tune, and diagnose device
- available software module in ROS framework (Hydro/Indigo/Jade/Kinetic)
- dimensions: 70 x 70 x 20 mm
- weight of about 200 g
Architecture
A diagram of the device is shown below and it contains encoder interfaces, the microcontroller module, a power stage, digital inputs, and outputs.
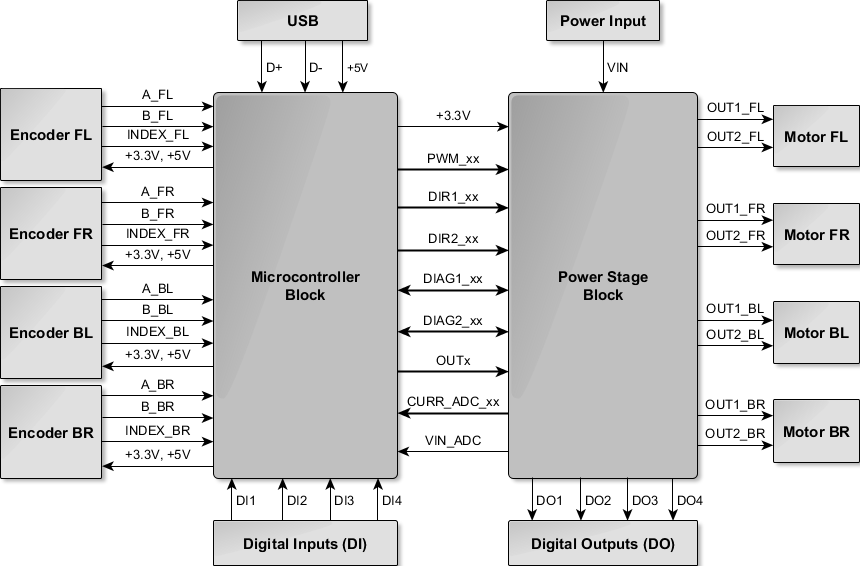
The block diagram of the motors controller
Drive controller ROS node
The below diagram shows the structure of the ROS node for the device. This node subscribes data like a set velocity: linear and angular, states of digital outputs. The node publishes the following information: odometry data (relative position and orientation), states of digital inputs, and supply voltage. The node code was published on GitHub: https://github.com/mdrwiega/md_drive_controller .
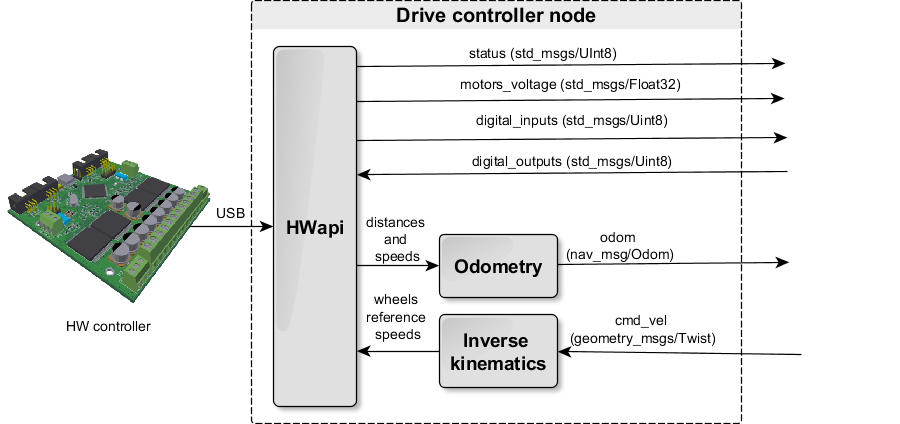
The structure of the ROS node for the device
Electronic design
The hardware part was designed in the open-source software KiCad, which was used in the creation of the visualization placed below.

The device visualization from KiCad
Tests of device
The device has been tested on multiple robots, especially on the four-wheeled robot presented in another post.
The precision of the odometry system has been confirmed with the motion capture system OptiTrack equipped with six cameras.
Hey, The board seems interesting. Can I purchase the board ?
Hey,
thanks for the comment. Unfortunately, the software is still in the development stage and it’s not reliable enough.
Best regards
Damn, I was thinking the same. Could there be an interface for individual motor control (to use omniwheels) or better, could it be compatible with omniwheels (the kinematics model has to change)?
Thanks for comment and good suggestion. I haven’t implemented that mode yet. Currently, there is an interface for control each motor separately, so the omniwheels kinematics model could be implemented in dedicated ROS driver.
Is it available.
I want to buy this… please update and share some videos of this controller… you work is very great.
Sorry but it hasn’t been finished yet.
Please add my address to the list of those interested in purchasing this board.
I wonder how I can buy this driver