
W celu dostarczenia napięć dla poszczególnych modułów opisanego wcześniej robota czterokołowego, a także zabezpieczenia jego akumulatorów, zaprojektowano i wykonano dedykowany moduł zasilania.
Napięcie zasilania dostarczane z akumulatorów zostało w module rozdzielone na trzy linie. Pierwsza odpowiada za dostarczenie napięcia zasilania do silników i płyną w niej największe prądy. Druga linia dostarcza prąd do przetwornic impulsowych obniżających napięcie, z których następnie zasilana jest większa część układów logicznych. Trzecia linia wykorzystuje stabilizator liniowy i dostarcza zasilanie pomocnicze o napięciu 5 V do układów kontrolujących stan akumulatora.

Schemat głównej części modułu zasilania
Przetwornice impulsowe i przełączniki zasilania
W module wykorzystano dwie przetwornice impulsowe oparte na układach ST1S10 firmy STMicroelectronics obniżające napięcie akumulatora do około 3,3 V i 5 V. Proces doboru elementów, a także projektowania obwodów drukowanych został opisany w nocie aplikacyjnej ST1S10 Application Note.
Układ zaprojektowano w taki sposób, aby z poziomu komputera nadrzędnego (Raspberry Pi) była możliwość odłączania napięć zasilających dla poszczególnych modułów robota. Przełączniki wykonano z wykorzystaniem tranzystorów unipolarnych MOSFET z kanałem P (modele IRLML6402) w odpowiedniej konfiguracji. Dodatkowo, przełączanie napięcia zasilającego silniki wymagało zastosowania tranzystora unipolarnego Si7141DP firmy Vishay, który dopuszcza przepływ znacznie większych prądów przez złącze źródło-dren.
Zabezpieczenia i filtracja
W module zrealizowano różnego rodzaju zabezpieczenia akumulatorów, jak i zasilanych układów. Linia dostarczająca prąd do silników, jak i linia zasilająca układy logiczne zostały zabezpieczone przed odwrotną polaryzacją napięcia zasilającego. Zrealizowano to z wykorzystaniem tranzystorów unipolarnych MOSFET z kanałem N. Ponadto, linie zostały zabezpieczone przed nadmiernym poborem prądu, do czego wykorzystano zwłoczny, szklany bezpiecznik na linii zasilającej silniki. Natomiast na linii zasilającej logikę znajduje się bezpiecznik polimerowy, którego zaletą są niewielkie wymiary, a także możliwość wielorazowego użytku. Warto zauważyć, także, że każda linia logiczna podłączona do komputera nadrzędnego, została zabezpieczona przed przepięciami za pomocą diod Zenera.
W celu ochrony akumulatorów przed nadmiernym rozładowaniem, zrealizowano układ odłączający zasilanie części logicznej i silników w przypadku, gdy napięcie zasilania spadnie poniżej zadanego poziomu. Wykorzystano do tego celu układ komparatora z histerezą, który został zasilony napięciem pomocniczym. Próg napięcia, przy którym zasilanie jest odłączane ustalony został jako 9,3 V. Natomiast ponowne załączenie zasilania wymaga napięcia akumulatorów na poziomie 9,6 V.
Do zmniejszenia tętnienia napięcia zasilania wykorzystano szereg elementów, do których zaliczyć można: kondensatory elektrolityczne, kondensatory tantalowe, kondensatory ceramiczne, a także diody zabezpieczające (transile). Kondensatory elektrolityczne i tantalowe wykorzystane zostały jako magazyny energii, czyli źródła energii o znacznej, chwilowej wydajności. Stosowano je z reguły w pobliżu układów pobierających chwilowo lub ciągle duże prądy, a także na liniach, które takie prądy przenoszą. Odpowiednio dobrane pojemności pozwalają odfiltrować zakłócenia o niskich częstotliwościach. W celu odfiltrowania zakłóceń o wyższych częstotliwościach, zastosowano kondensatory ceramiczne. Wykorzystano także diody zabezpieczające, chroniące układ przed przepięciami.
Wskaźnik napięcia oraz pomiar napięć poszczególnych ogniw akumulatorów litowo-polimerowych
Moduł zasilania wyposażono w prosty wskaźnik napięcia akumulatorów, zrealizowany na trzech diodach LED. Jego rola ogranicza się w zasadzie do wykorzystania przy testach układu, ponieważ umieszczony został bezpośrednio na płycie modułu. Ponadto, w module zamieszczono przetwornik analogowy-cyfrowy AS1540 produkcji firmy Austria Microsystems, wraz z odpowiednimi dzielnikami napięć wejściowych. Umożliwia on mierzenie napięć poszczególnych ogniw akumulatora. Komunikacja z przetwornikiem realizowana jest przez magistralę I2C, co pozwala na odczytywanie stanu akumulatora z poziomu komputera nadrzędnego.

Schemat części modułu zasilania odpowiedzialnej za pomiar napięć akumulatorów
Wizualizacje 3D modułu zasilania robota czterokołowego
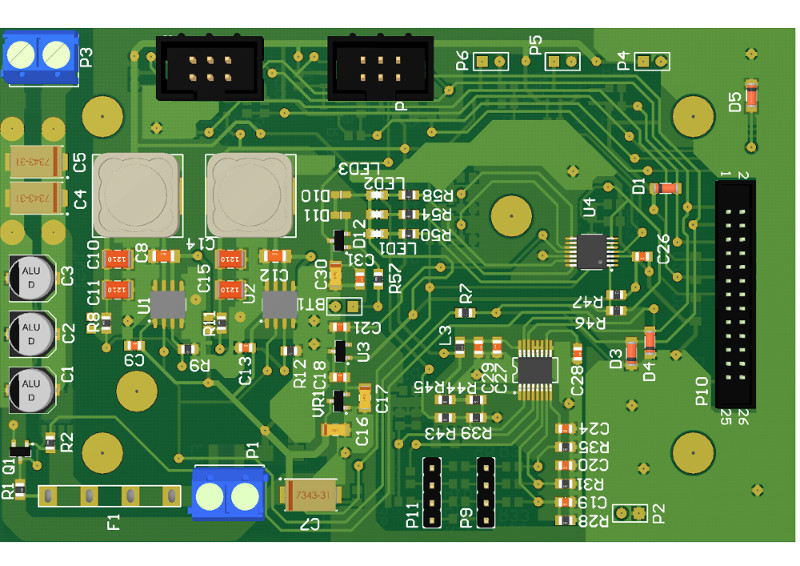
Wizualizacja modułu zasilania – widok z góry

Wizualizacja modułu zasilania – widok z dołu